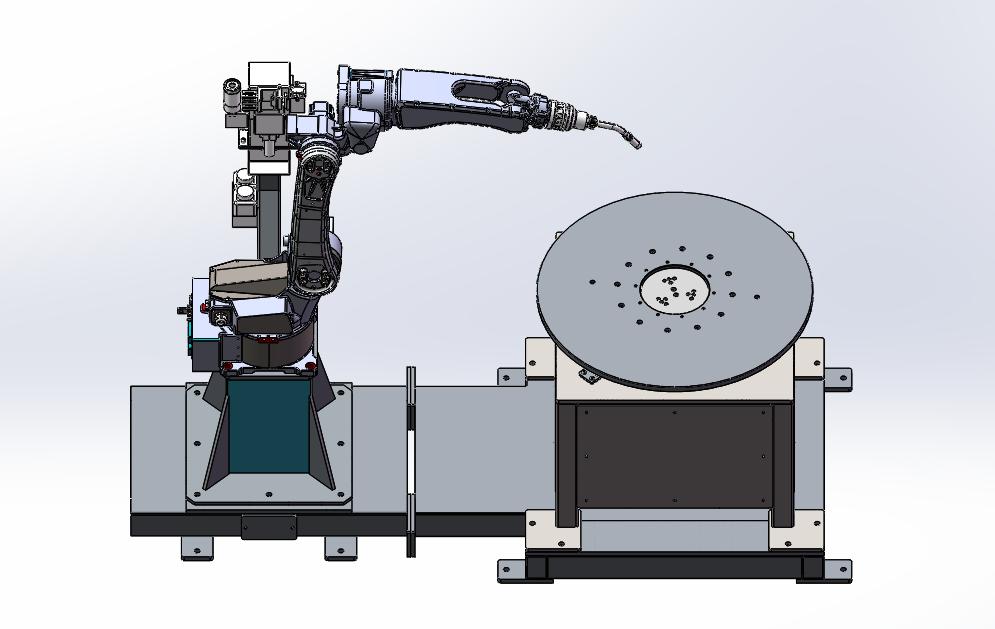
६ अक्ष स्टेनलेस स्टील आल्मुनियम वेल्डिंग रोबोटिक्स वर्कस्टेशन






सुविधा
१. रोबोटको निर्मित केबल डिजाइनले रोबोटलाई कुनै हस्तक्षेप बिना चल्न अनुमति दिन्छ र वर्कस्टेशन लेआउट सफा र व्यवस्थित छ।
२. रोबोट नियन्त्रण क्याबिनेटले जटिल PLC डिबगिङ र ठाउँ कब्जाबाट बच्न ११ अक्षहरूसम्म नियन्त्रण गर्न सक्छ।
३. JHY रोबोट र पोजिसनरलाई सिङ्क्रोनाइज गर्न सकिन्छ, र पोजिसनर घुमिरहेको बेला रोबोटले एकैसाथ वेल्ड गर्न सक्छ, जसले गर्दा यो वर्कस्टेशन गोलाकार वेल्डिङको लागि विशेष रूपमा उपयुक्त छ।
४. लेजर सेन्सर, सुरक्षा प्रकाश पर्दा र सुरक्षा बार जस्ता सहायक उपकरणहरूको विस्तृत श्रृंखला उपलब्ध छ।
५. नियन्त्रण प्रणालीमा धेरै वेल्डिंग प्रक्रिया प्याकेजहरू छन्, जसले विभिन्न वर्कपीसहरूको लागि विभिन्न वेल्डिंग मोडहरू प्रयोग गर्न अनुमति दिन्छ।
पोजिसनर प्राविधिक प्यारामिटर
| मोडेल | JHY4030D-080 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं। |
| मूल्याङ्कन गरिएको इनपुट भोल्टेज | एकल-चरण २२०V, ५०/६०HZ |
| मोटर इन्सुलेशन क्याल्स | F |
| काम गर्ने तालिका | व्यास ८०० मिमी (अनुकूलित गर्न सकिन्छ) |
| तौल | लगभग ४०० किलोग्राम |
| अधिकतम पेलोड | अक्षीय पेलोड ≤३०० किलोग्राम / ≤५०० किलोग्राम / ≤१००० किलोग्राम (~१००० किलोग्राम अनुकूलित गर्न सकिन्छ) |
| दोहोरिने क्षमता | ±०.१ मिमी |
| रोक्नुहोस् स्थिति | कुनै पनि पद |
रोबोट कार्यस्थानका अवयवहरू
१. वेल्डिङ रोबोट:
प्रकार: MIG वेल्डिंग रोबोट-BR-1510A, BR-1810A, BR-2010A
TIG वेल्डिङ रोबोट: BR-1510B, BR-1920B
लेजर वेल्डिङ रोबोट: BR-1410G, BR-1610G
२. पदाधिकारी
मोडेल: JHY4030D-080
प्रकार: १-अक्ष तेर्सो घुम्ने पोजिसनर
३. वेल्डिङ पावर स्रोत
प्रकार: ३५०A/५००A वेल्डिङ पावर स्रोत
४. वेल्डिङ बन्दुक
प्रकार: एयर-कूल्ड गन, वाटर-कूल्ड गन, पुश-पुल गन
५. मशाल सफा गर्ने स्टेशन:
मोडेल:SC220A
प्रकार: स्वचालित वायवीय वेल्डिंग टर्च क्लीनर
अन्य रोबोट कार्यस्थल परिधीय
१. रोबोट चल्ने रेल
मोडेल: JHY6050A-030
२. लेजर सेन्सर (वैकल्पिक)
कार्य: वेल्ड ट्र्याकिङ, स्थिति निर्धारण।
३. सुरक्षा प्रकाश पर्दा (वैकल्पिक)
सुरक्षात्मक दूरी: ०.१-२ मिटर, ०.१-५ मिटर; सुरक्षात्मक उचाइ: १४०-३१८० मिमी
४. सुरक्षा बार (वैकल्पिक)
५.PLC क्याबिनेट (वैकल्पिक)





